Multi-Sensor Integration and Precision Calibration
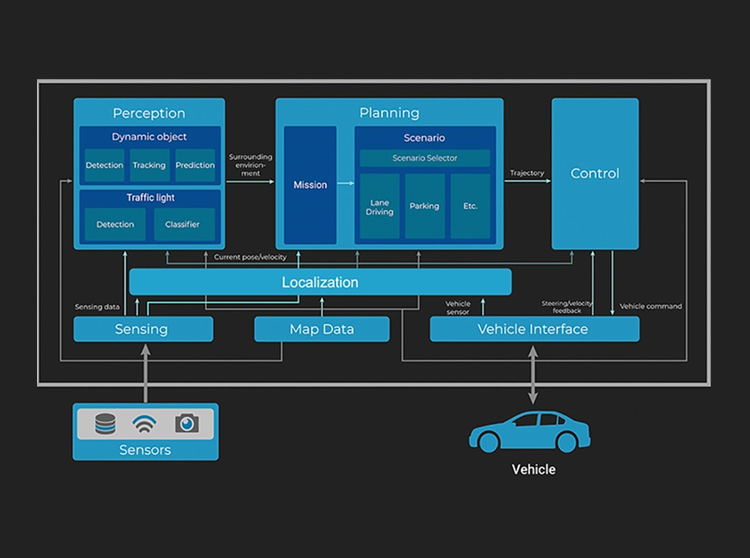
An automotive client required high-accuracy sensor integration for their autonomous vehicle platform. The perception system comprised:
Critical Requirements:
The client's internal team lacked the bandwidth to handle multi-sensor synchronization and validation at this scale within their tight project timeline.
Helpforce engineers led the comprehensive integration and calibration of the entire perception stack:
Precision Calibration:
Sensor Fusion Implementation:
System Integration:
Documentation & Knowledge Transfer:
Project Management:
Technical Achievement:
Timeline Success:
Client Impact:
LiDAR | RGB Cameras | Ultrasonic Sensors | IMU | GNSS | ROS2 | Sensor Fusion | Calibration Tools | Real-Time Perception Pipelines
Precise multi-sensor integration is the foundation of reliable autonomous systems. Proper calibration, synchronization, and fusion enable accurate perception and decision-making in real-world environments.