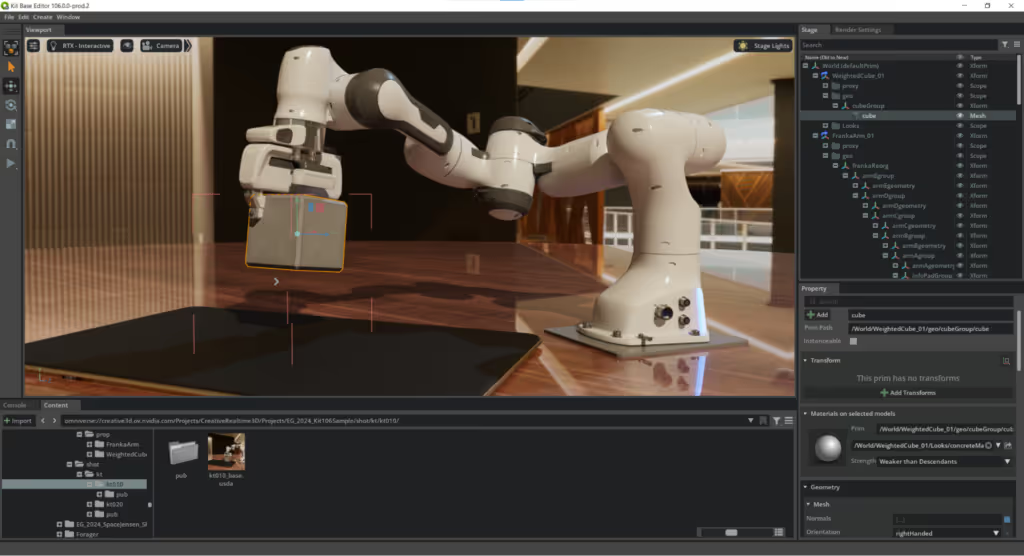
We create photorealistic 3D models of your facility using NVIDIA Omniverse—the same technology used by BMW, Lockheed Martin, and Ericsson for digital twin simulation.
The result? A permanent virtual training ground where robots can practice thousands of times without ever setting foot in your actual facility.

A digital twin is a precise virtual replica of your physical facility—think of it as creating a video game level of your building, but perfectly accurate.
It includes
Every room, hallway, door, and entrance
All obstacles, furniture, and equipment
Lighting conditions (day, night, artificial)
Restricted zones and special areas
Why It Matters
Once we have your digital twin, robots can train there infinitely—testing scenarios, learning behaviors, and validating performance—all without disrupting your actual operations.
It's like a flight simulator for robots.
Photorealistic 3D Model
Accurate geometry (within centimeters)
Visual appearance from real photos
Proper scale and proportions
All architectural details captured
Physics-Accurate Environment
Realistic material properties
Accurate collision detection
Proper lighting simulation
Sensor behavior modeling
Interactive Walkthrough
Explore your facility virtually from any angle
View from robot's perspective
Check coverage and blind spots
Request adjustments before training
Permanent Training Ground
Reusable for multiple robots
View from robot's perspective
Check coverage and blind spots
Request adjustments before training
Integration-Ready
NVIDIA Isaac Sim compatible
ROS2 simulation support
USD format (Universal Scene Description)
Supports physics engines (PhysX)
Timeline: Half-day to 2 days depending on facility size
360° laser scanning for precise geometry
Captures millions of measurement points
Accuracy within millimeters
Creates "point cloud" of your space
High-resolution photos from multiple angles
Captures visual appearance and textures
Color, lighting, and surface details
Creates photorealistic models
Import existing CAD files (if available)
Manual measurements for verification
Door locations and dimensions
Special features and annotations
Notes on special requirements
Restricted areas and hazards
Moving objects (vehicles, equipment)
Unusual features or challenges
Timeline: 1-2 weeks depending on facility complexity
Convert scan data to 3D model
Add visual textures from photos
Model all architectural features
Implement physics properties
Verify accuracy against measurements
Check for missing details
Validate scale and proportions
Test navigation paths
Balance visual quality with performance
Optimize for real-time simulation
Reduce unnecessary complexity
Ensure smooth robot training
Timeline: 3-5 days for review cycle
You "walk through" virtual facility
View from any angle or perspective
Check for accuracy and completeness
Identify any needed corrections
Request adjustments or additions
Correct any inaccuracies
Add missing details
Update restricted zones
You sign off on digital twin
Confirms ready for robot training
Establishes baseline for future updates
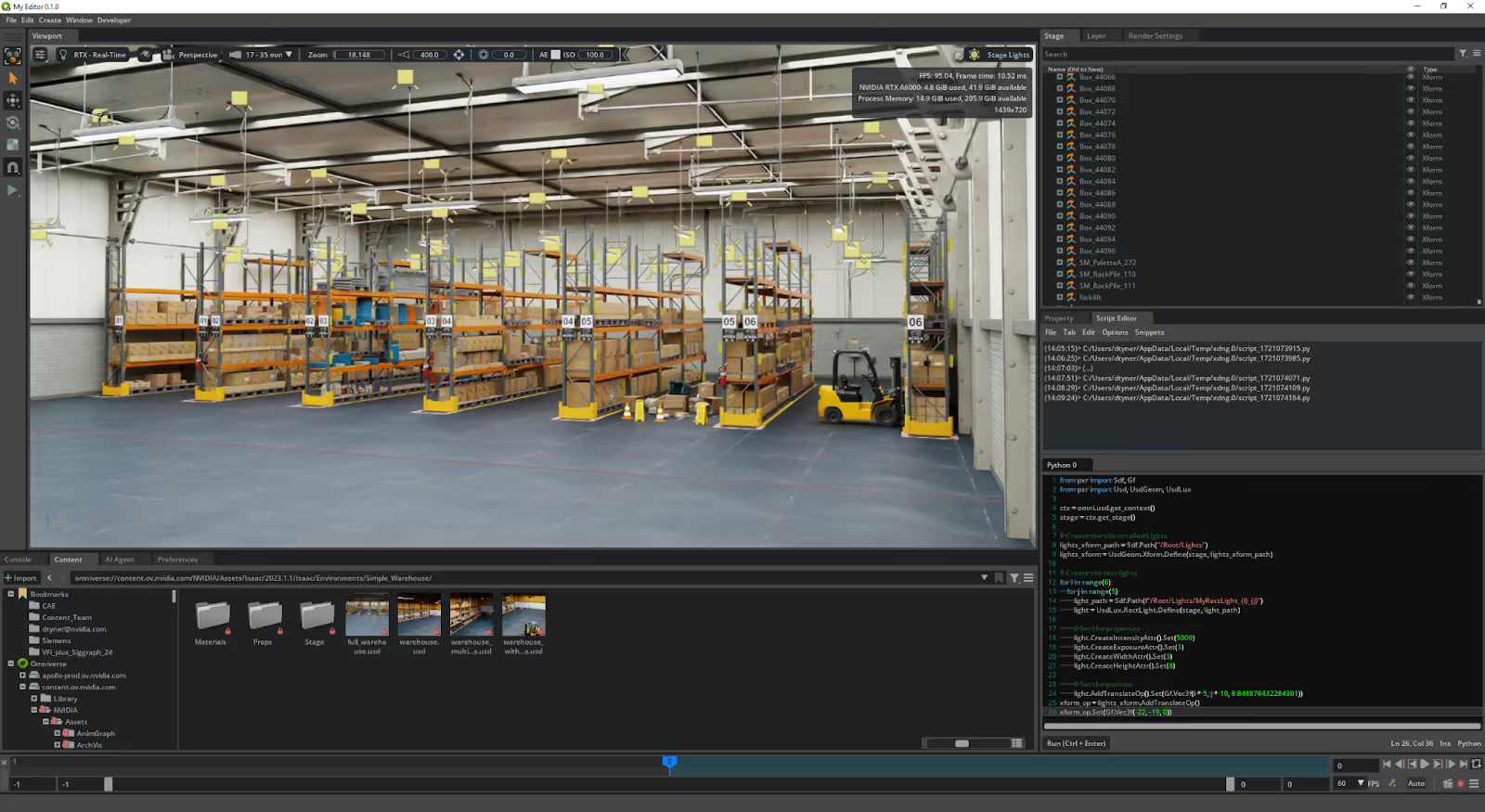
Import into NVIDIA Isaac Sim
Configure physics simulation
Set up sensor models
Prepare training scenarios
Test robot navigation
Verify sensor accuracy
Validate physics behavior
Confirm training readiness
Digital twin now permanent training ground
Robots can practice infinitely
All mistakes happen virtually
Zero risk to physical facility
Facility Planning & Layout Optimization
Test furniture arrangements virtually
Evaluate traffic flow patterns
Identify blind spots or bottlenecks
Plan renovations without disruption
Safety Training for Staff
Virtual facility tours for new employees
Emergency evacuation simulations
Safety protocol training
Hazard identification exercises
Virtual Tours for Stakeholders
Remote facility inspections
Investor or client presentations
Virtual walkthroughs before construction
Documentation for compliance
"What-If" Scenario Testing
Test new patrol routes before implementation
Simulate layout changes
Evaluate equipment placement
Assess security coverage
Documentation & Reference
Permanent record of facility state
Visual reference for contractors
Historical baseline for changes
Compliance documentation
Why Omniverse?
Industry standard for digital twins
Used by Fortune 500 companies
Photorealistic rendering with ray tracing
Real-time collaboration capabilities
Compatible with Isaac Sim for robotics
Technical Capabilities
USD (Universal Scene Description) format
GPU-accelerated rendering (RTX)
Physics simulation (PhysX 5)
Multi-user collaboration
Version control and iteration
Velodyne, Ouster, or equivalent
360° coverage, 10-20Hz scan rate
Range: 100m+ for outdoor areas
Accuracy: ±2cm typical
High-resolution DSLR cameras
Consistent lighting setup
Multiple angles for complete coverage
Color-calibrated for accuracy
Point cloud processing (CloudCompare, etc.)
3D modeling (Blender, Maya)
Texture mapping and optimization
Physics material assignment
USD (primary format)
FBX, OBJ (for compatibility)
Point cloud (PCD, LAS)
CAD formats (STEP, IGES)
What's Included
On-site data collection
3D model creation in Omniverse
Interactive walkthrough access
One round of revisions
Isaac Sim-ready format
Permanent license to digital twin
Updates & Maintenance
Minor updates: Included in support package
Major layout changes: Quoted separately
Annual refresh: Optional service
Small Facility (< 25,000 sq ft)
1-day data collection
1-week modeling
Medium Facility (25,000 - 75,000 sq ft)
1-2 day data collection
1-2 week modeling
Large Facility (75,000+ sq ft):
2+ day data collection
2-3 week modeling
Geometry is accurate within centimeters for critical features. Visual appearance is photorealistic. Physics behavior is validated against real-world tests.
Yes. We can update the digital twin quickly (usually days, not weeks). Minor changes are often included in support packages.
Yes. You receive a permanent license to use your digital twin for any purpose. We retain no rights to it.
Absolutely. Many clients use digital twins for facility planning, staff training, virtual tours, and scenario testing.
We've handled facilities from 10,000 to 200,000+ sq ft. Large or complex facilities just require more data collection time and modeling work. We'll provide a custom timeline and quote.
Indefinitely, as long as your facility layout doesn't change significantly. Small changes (furniture moved, etc.) can be updated easily.
Even if you're not deploying robots yet, we can create a digital twin of your facility for:
Facility planning and optimization
Virtual tours and presentations
Future robot deployment preparation
Documentation and compliance
Timeline: 2-4 weeks typical
Investment: Based on facility size
Digital twin creation is included in all robot deployment projects. When you deploy a security robot, patrol system, or autonomous vehicle, we create your digital twin as part of the process.