Challenge
A leading automotive manufacturer faced significant bottlenecks in their autonomous vehicle development pipeline. Engineers were manually editing over 100 configuration files for each sensor setup iteration in the ROS2 environment. This process was:
- Time-intensive and error-prone
- Dependent on experienced developers with deep ROS2 expertise
- Limited in early-stage vehicle modeling capabilities
- Lacked integrated tools for validating sensor coverage
- Created delays in iterative testing cycles
The client needed a way to rapidly configure, visualize, and validate complex sensor arrays without manual file manipulation.
Solution
Helpforce engineers designed and deployed a custom Python-based graphical user interface (GUI) that revolutionized the sensor configuration workflow. The tool integrated:
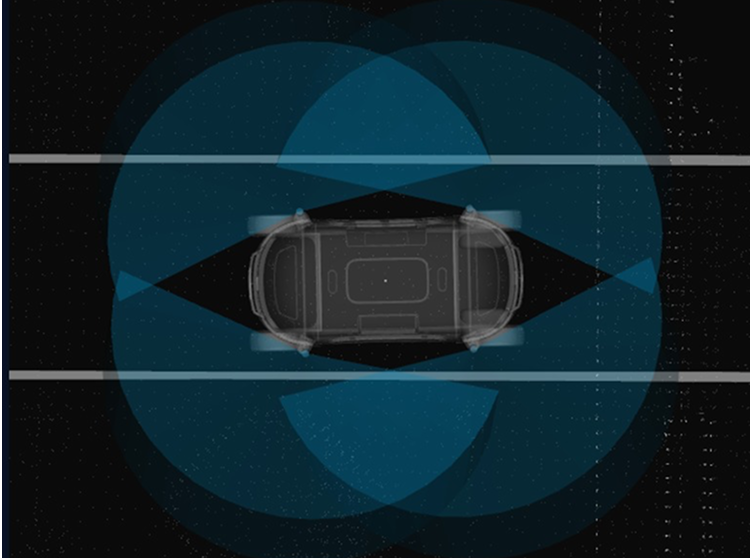
Real-Time Simulation Environment:
- Live field-of-view (FOV) visualization for all sensor types
- Interactive sensor placement and adjustment
- Immediate visual feedback on coverage and blind spots
Automated Configuration Generation:
- ROS2-ready file generation without manual editing
- Support for cameras, LiDARs, and ultrasonic sensors
- Validation checks to prevent configuration errors
3D Vehicle Modeling:
- Integrated vehicle model rendering
- Layout export capabilities for documentation
- Multi-view perspective options
User-Friendly Interface:
- Enabled non-technical users to perform complex configurations
- Reduced dependency on ROS2 specialists
- Modular architecture tailored to client's vehicle platforms
Results
Efficiency Gains:
- ⚡ 80% reduction in sensor configuration time
- 🎯 Eliminated manual file editing errors
- 👥 Democratized access to configuration tools across teams
Development Impact:
- 📈 Significantly accelerated early-phase development cycles
- ✅ Improved collaboration between engineering disciplines
- 🔄 Enabled rapid iteration and testing of sensor layouts
Delivery Excellence:
- Full product lifecycle ownership from requirements to deployment
- Comprehensive user training and documentation
- Ongoing support and feature enhancements
Technologies Used
Python | ROS2 | GUI Development | 3D Visualization | Sensor Simulation | Field-of-View Modeling
Key Takeaway
Digital twin simulation environments enable teams to test, validate, and optimize complex autonomous systems in virtual space before physical implementation—dramatically reducing development time, costs, and risks.